{kind=link}
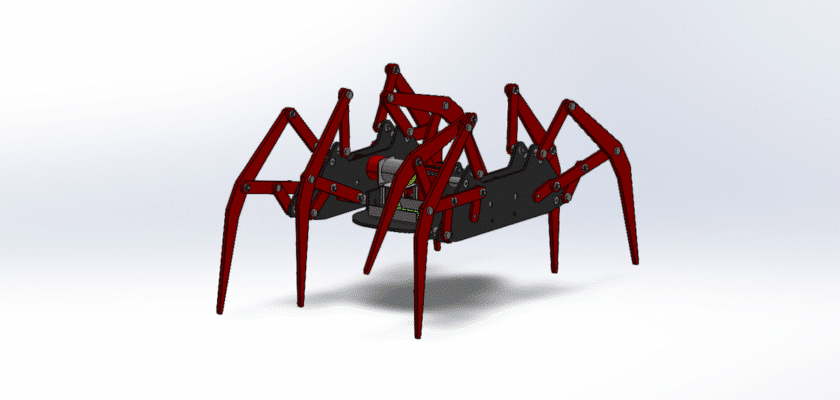
Venture into the exciting world of bio-inspired robotics with our complete mechanical drawing for the Crawling Robot 01. This design provides the blueprint for a sophisticated hexapod (six-legged) walking robot, a fantastic project for students, makers, and robotics enthusiasts. The multi-legged design allows for superior stability and the potential to navigate uneven terrain where wheeled robots might fail. Our free drawing is your first step toward building a complex and impressive mechatronic creation.
This drawing focuses on the complete mechanical structure, from the chassis to the intricate leg mechanisms, providing a solid foundation for your build. It’s a perfect project for those looking to explore advanced topics like kinematics and remote control. By providing the mechanical plans, we empower you to focus on the electronics and programming that will bring your creation to life.
Key Features:
- Hexapod Chassis Design: The drawing details a lightweight yet rigid main body, specifically designed to house the necessary servos, microcontroller (like an Arduino or Raspberry Pi), and power supply.
- 3-DOF Articulated Legs: Each of the six legs features a 3-Degrees-of-Freedom (DOF) design, allowing for a wide range of motion and enabling the implementation of complex walking gaits.
- Integrated Servo Mounts: The components include precise and secure mounting points engineered for standard-sized hobby servos, greatly simplifying the assembly process.
- Optimized for Fabrication: The parts are designed to be easily manufactured using popular DIY methods such as 3D printing or laser cutting, making the project accessible to any modern workshop.