{kind=link}
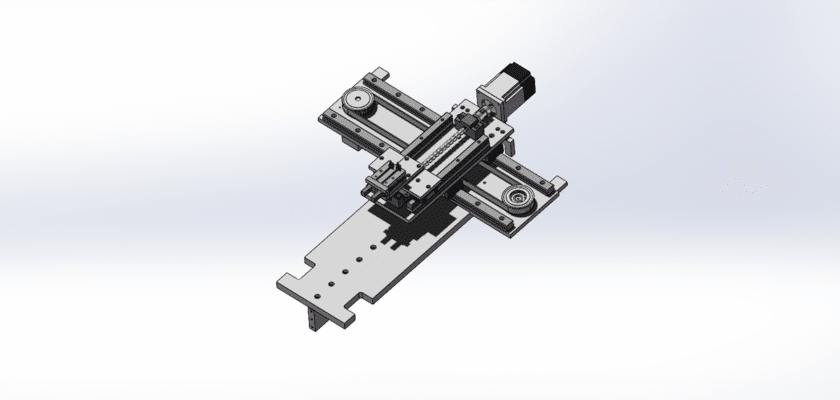
رسم روبوت الالتقاط والوضع ثنائي المحور والإحداثيات هو رسم توضيحي تقني مفصل يوضح تصميم ومكونات ووظائف نظام روبوتي مصمم لعمليات الالتقاط والوضع في الأتمتة الصناعية. يُعد هذا الرسم ضروريًا للمهندسين والفنيين والمشغلين المشاركين في تصميم الروبوت وتجميعه وصيانته.
الميزات الرئيسية:
- التخطيط العام:نظرة شاملة على هيكل الروبوت، توضح ترتيب المكونات الرئيسية مثل الذراع الروبوتية والقاعدة ونظام التحكم.
- تصميم الذراع الروبوتية:رسوم توضيحية تفصيلية للذراع ثنائي المحور، بما في ذلك:
- المفاصل والمحاور:رسوم بيانية توضح نقاط التقاطع التي تسمح بالحركة على طول إحداثيين (أفقي ورأسي).
- المؤثر النهائي:معلومات عن الممسك أو الأداة المرفقة في نهاية الذراع، والمصممة لالتقاط الأشياء ووضعها.
- هيكل القاعدة والدعم:أوصاف القاعدة المستقرة التي تدعم الذراع وتوفر أساسًا للحركة، بما في ذلك أي ميزات تثبيت أو تثبيت.
- نظام التحكم:معلومات عن وحدة التحكم المركزية التي تدير حركات الروبوت، مما يسمح للمشغلين ببرمجة وضبط المعلمات لمهام الالتقاط والوضع.
- واجهة المستخدم:رسوم توضيحية للوحة التحكم أو شاشة اللمس التي توفر وصولاً بديهيًا إلى إعدادات الماكينة وخيارات البرمجة وأوضاع التشغيل.
- آلية الحركة:رسوم بيانية تفصيلية للآليات التي تسمح للذراع بالتحرك، مثل المحركات، والتروس، والوصلات التي تسهل التشغيل السلس على طول المحورين.
- مزود الطاقة:معلومات عن مصدر الطاقة والأسلاك التي توفر الطاقة للروبوت، بما في ذلك أي ميزات أمان مرتبطة بالمكونات الكهربائية.
- أجهزة الاستشعار وأنظمة التغذية الراجعة:رسوم بيانية توضح أجهزة الاستشعار المتكاملة التي تراقب موضع الروبوت واتجاهه، مما يضمن وضع الأشياء بشكل دقيق.
- ميزات السلامة:معلومات عن آليات السلامة، مثل التوقف في حالات الطوارئ، ووسائل الحماية، والأقفال لضمان التشغيل الآمن أثناء مهام الالتقاط والوضع.
- نقاط وصول الصيانة:إرشادات حول المناطق المصممة لسهولة الوصول إليها أثناء الصيانة والإصلاح، مما يسهل الخدمة الفعالة للمعدات.
يُعد هذا الرسم بمثابة مرجع أساسي لأي شخص مشارك في تشغيل وصيانة روبوتات الالتقاط والوضع ثنائية المحور والإحداثيات، مما يضمن الأداء الفعال والكفاءة والالتزام بمعايير الصناعة في تطبيقات الأتمتة المختلفة، مثل خطوط التجميع والتعبئة والتغليف ومناولة المواد.