{kind=link}
الروبوت سداسي المحاور، المعروف أيضًا باسم الروبوت المفصلي، هو ذراع ميكانيكية متعددة الاستخدامات ومتطورة مصممة للأتمتة الصناعية. بفضل ست درجات حرية، يمكنه محاكاة حركات الذراع البشرية، مما يسمح بمهام معقدة ونطاق حركة واسع. يعمل كل محور، أو مفصل، بمحرك سيرفو، مما يتيح حركات دورانية حول المحاور x وy وz (التدحرج، والميل، والانحراف). يسمح هذا التصميم المعقد للروبوت بأداء عمليات دقيقة وفعالة في مختلف عمليات التصنيع.
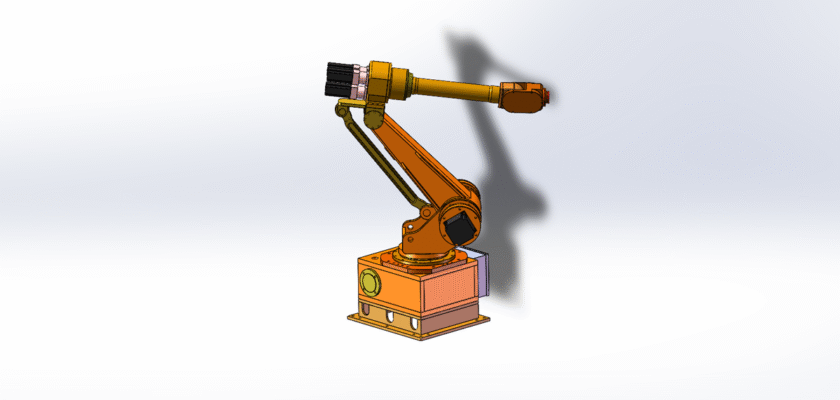
يقدم رسمنا الشامل نظرة تفصيلية على المكونات الأساسية وهيكل روبوت بستة محاور. ويشمل: القاعدة والكتف والكوع والمعصم والطرف المؤثرصُممت جميعها بدقة لتعمل بتناغم. المحاور الثلاثة الأولى مسؤولة عن وضع الذراع، بينما توفر المحاور الثلاثة الأخيرة تحكمًا دقيقًا لتوجيه الأداة. يُعد هذا الرسم موردًا قيّمًا للطلاب والمهندسين والهواة الذين يتطلعون إلى فهم أو تصميم أو بناء أنظمتهم الروبوتية الخاصة. ستكتسب فهمًا عميقًا للتكوين الميكانيكي، ووصلات المفاصل، والتصميم العام الذي يُسهم في قابلية التكيف والأداء العاليين.
الميزات الرئيسية:
- ست درجات من الحرية: يوفر نطاقًا كاملاً من الحركة، مما يتيح للروبوت الوصول إلى أي نقطة واتجاه داخل مساحة عمله.
- التصميم المفصل: يحاكي ذراع الإنسان لتحقيق براعة ومرونة استثنائية.
- الدقة والقدرة على التكرار: تم تصميمها لتحقيق دقة عالية، مما يضمن نتائج متسقة في المهام المتكررة مثل اللحام والتجميع ومناولة المواد.
- تطبيقات متعددة: مناسبة لمجموعة واسعة من الصناعات بما في ذلك صناعة السيارات والإلكترونيات والخدمات اللوجستية.
- رسم CAD مفصل: يجب اقتناؤه لأغراض تعليمية ومشاريع "اصنعها بنفسك" ومرجع مهني.