{kind=link}
انطلق في عالم الروبوتات المستوحاة من الكائنات الحية المثير مع رسوماتنا الميكانيكية الكاملة الروبوت الزاحف 01يُقدّم هذا التصميم مخططًا أوليًا لروبوت متطور سداسي الأرجل، وهو مشروع رائع للطلاب والمُصنّعين وهواة الروبوتات. يُتيح التصميم متعدد الأرجل ثباتًا فائقًا وإمكانية التنقل في التضاريس الوعرة التي قد تفشل فيها الروبوتات ذات العجلات. يُعدّ رسمنا الحرّ خطوتك الأولى نحو بناء ابتكار ميكاتروني مُعقّد ومُبهر.
يُركز هذا الرسم على الهيكل الميكانيكي بالكامل، من الهيكل إلى آليات الأرجل المعقدة، مما يوفر أساسًا متينًا لبناء مشروعك. إنه مشروع مثالي لمن يرغبون في استكشاف مواضيع متقدمة مثل علم الحركة والتحكم عن بُعد. من خلال توفير المخططات الميكانيكية، نُمكّنك من التركيز على الإلكترونيات والبرمجة التي ستُضفي حيوية على إبداعك.
الميزات الرئيسية:
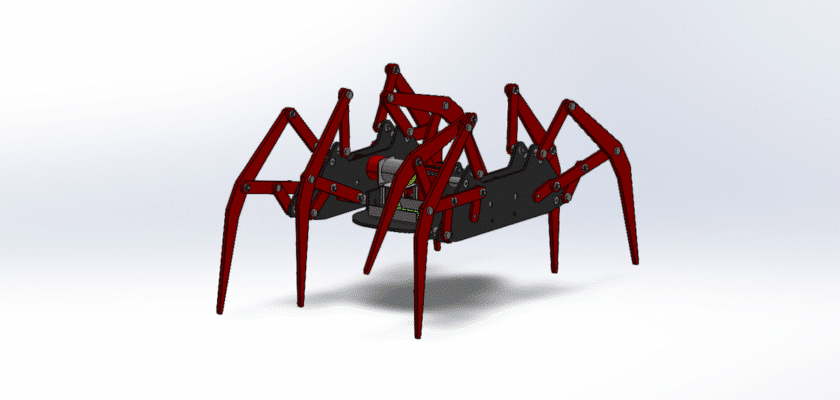
- تصميم هيكل سداسي الأرجل: تتضمن الرسومات تفاصيل جسم رئيسي خفيف الوزن ولكنه صلب، تم تصميمه خصيصًا لاستيعاب المحركات المؤازرة الضرورية، ووحدة التحكم الدقيقة (مثل Arduino أو Raspberry Pi)، ومصدر الطاقة.
- أرجل مفصلية ثلاثية الدرجات: تتميز كل من الأرجل الستة بتصميم 3 درجات حرية (DOF)، مما يسمح بمجموعة واسعة من الحركة وتمكين تنفيذ مشيات معقدة.
- حوامل المؤازرة المتكاملة: تتضمن المكونات نقاط تثبيت دقيقة وآمنة مصممة خصيصًا لمحركات الهواة ذات الحجم القياسي، مما يبسط عملية التجميع إلى حد كبير.
- مُحسَّن للتصنيع: تم تصميم الأجزاء بحيث يتم تصنيعها بسهولة باستخدام طرق التصنيع المنزلية الشائعة مثل الطباعة ثلاثية الأبعاد أو القطع بالليزر، مما يجعل المشروع متاحًا لأي ورشة عمل حديثة.