{kind=link}
ادخل إلى عالم الروبوتات الرائع من خلال رسوماتنا الفنية المجانية العنكبوت الميكانيكي 2 روبوت. تُقدم هذه المجموعة الشاملة من المخططات نظرةً مُفصّلةً على التصميم والهندسة المُعقّدين وراء آلة المشي متعددة الأرجل. يُعدّ تصميم "العنكبوت" تحفةً في المحاكاة الحيوية، إذ يُظهر كيف يُحاكي المهندسون الحركات البيولوجية للتنقل في التضاريس غير المستوية بثباتٍ وخفة حركة. تُقدّم الرسومات نظرةً مُعمّقةً على الروابط المُعقّدة، ومواضع مُحرّكات السيرفو، والهيكل الهيكلي، التي تعمل معًا لإنشاء روبوت ديناميكيّ قادر على المشي.
تُعد حزمة الرسومات هذه موردًا أساسيًا لطلاب الروبوتات والهواة والمحترفين. من خلال دراسة هذه المخططات، ستكتسب فهمًا أعمق للحركية العكسية، وتنسيق الأرجل، والتحديات الميكانيكية لإنشاء روبوت متحرك. تُعد المخططات التفصيلية أداة تعليمية مثالية لتعلم تكامل الأجزاء الميكانيكية والإلكترونية. سواء كنت تُنشئ روبوتك الخاص أو ترغب فقط في معرفة كيفية عمل هذه الآلات، فإن رسوماتنا المجانية المتوافقة مع برامج التصميم بمساعدة الحاسوب (CAD) تُعد موردًا قيّمًا. حمّلها اليوم وابدأ رحلتك في عالم الروبوتات ذات الأرجل.
الميزات الرئيسية:
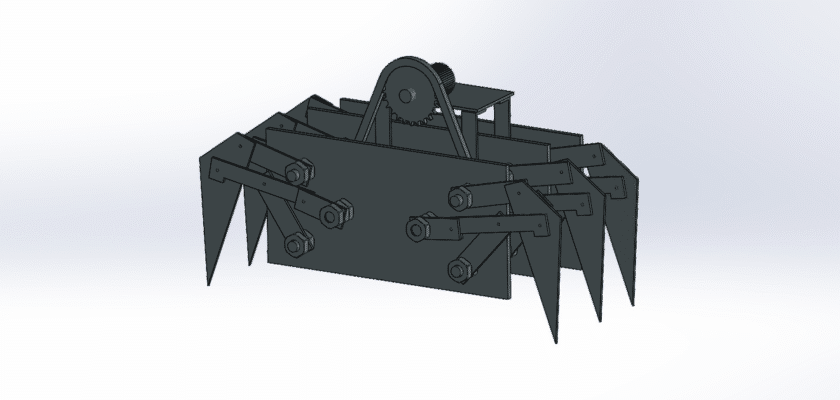
- ربط الساق المعقدة: تُظهر الرسومات تفاصيل تصميم الساق المعقد، وتُظهر الروابط والمفاصل التي تُمكّن من الحركة والاستقرار في اتجاهات متعددة.
- تكامل محرك السيرفو: توضح المخططات التفصيلية الوضع الدقيق وتركيب محركات المؤازرة لكل ساق، وهو أمر ضروري للحركة المتحكمة والسلسة.
- التصميم الحيوي: وتسلط الخطط الضوء على كيفية محاكاة الهيكل لأرجل العنكبوت الحقيقية، مما يسمح بالتنقل بكفاءة على مختلف الأسطح.
- البناء المعياري: يوفر التصميم فهمًا واضحًا للنظام الذي تم بناؤه مع وضع الوحدات النمطية في الاعتبار، مما يجعل من السهل تجميعه وتعديله وإصلاحه.