{kind=link}
ادخل إلى عالم الروبوتات من خلال الرسم الفني المجاني الخاص بنا معالج روبوتيهذا المورد الأساسي ضروري لمهندسي الميكانيكا وخبراء الروبوتات والطلاب. يوفر الرسم الشامل عرضًا تفصيليًا لجميع المكونات الرئيسية، بما في ذلك وصلات الذراع، والمفاصل (الدوارة والمنشورية)، والمُنفذ الطرفي، ومحركات الدفع. بتنزيل هذه المخططات، ستكتسب فهمًا عميقًا لكيفية تصميم هذه الأنظمة المعقدة لمحاكاة الذراع البشرية، مما يُمكّنها من أداء مجموعة واسعة من المهام بسرعة ودقة في التصنيع والتجميع والبحث.
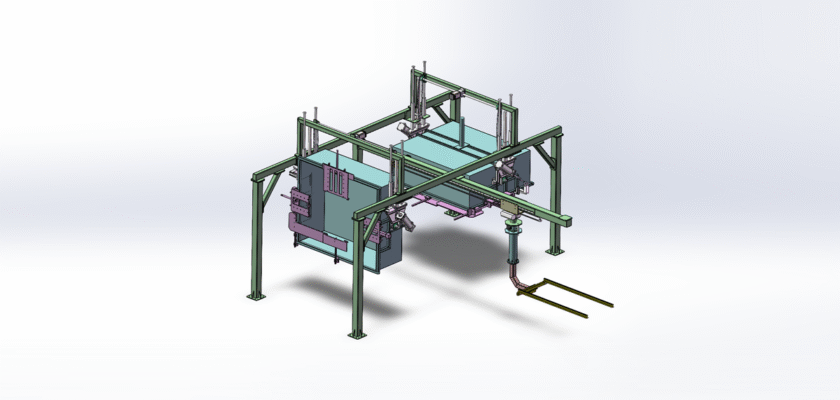
يُعدّ المُناول الروبوتي حجر الزاوية في الأتمتة الحديثة، ويُبرز رسمنا تصميمه المتين والمرن الذي يُتيح تعدد استخداماته. ستلاحظ كيف يُتيح الجمع بين المفاصل المختلفة درجات متعددة من الحرية، مما يُمكّن الذراع من الوصول إلى الأشياء والتحكم بها في بيئات مُعقدة. هذه المعرفة لا تُقدّر بثمن لتصميم الأنظمة، واستكشاف الأخطاء وإصلاحها، والمشاريع التعليمية. سواء كنت تُنشئ روبوتًا جديدًا، أو تدرس لدورة تدريبية، أو ببساطة تُبدي فضولًا بشأن آليات الذراع الروبوتية، فإن هذا الرسم إضافة لا غنى عنها لمكتبتك المهنية والتعليمية.
الميزات الرئيسية:
- المفاصل ودرجات الحرية: يوضح الرسم تصميم المفاصل المختلفة، موضحًا كيف يحدد تكوينها نطاق حركة المتلاعب ومرونته.
- المؤثر النهائي: وتوضح الخطط تصميم المقبض أو الأدوات الأخرى المثبتة في نهاية الذراع، والتي تعتبر ضرورية للتفاعل مع البيئة وأداء مهام محددة.
- أنظمة القيادة: تُظهر الوثيقة تكامل محركات المؤازرة وعلب التروس التي توفر الحركة الدقيقة والقوية المطلوبة لتحريك أجزاء الذراع وحمل الأحمال الثقيلة.
- تصميم معياري: يسلط التصميم الضوء على النهج المعياري، مما يسمح بالتخصيص والتكيف السهل للذراع لتطبيقات مختلفة عن طريق تغيير المحرك النهائي أو إضافة روابط إضافية.