{kind=link}
آلية الإمساك الروبوتية، والمعروفة أيضاً باسم القابض الآلي أو المستجيب الطرفي، هي الجهاز المتصل بطرف الذراع الآلية الذي يسمح لها بالتفاعل مع بيئتها. إنها "يد" الروبوت، وهي مصممة لأداء مهام مثل التقاط الأشياء وحملها ووضعها. تأتي هذه الآليات في مجموعة متنوعة من الأشكال، بدءاً من القابض المتوازي البسيط ذي الإصبعين إلى أنظمة التفريغ المعقدة والأدوات المغناطيسية، وكل منها مصمم خصيصاً لتطبيق معين. ويُعد اختيار القابض أمرًا حاسمًا لنجاح أي مهمة مؤتمتة، حيث يجب أن يكون قادرًا على الإمساك بالجسم بشكل آمن دون إتلافه، مع توفير السرعة والدقة اللازمتين للمهمة.
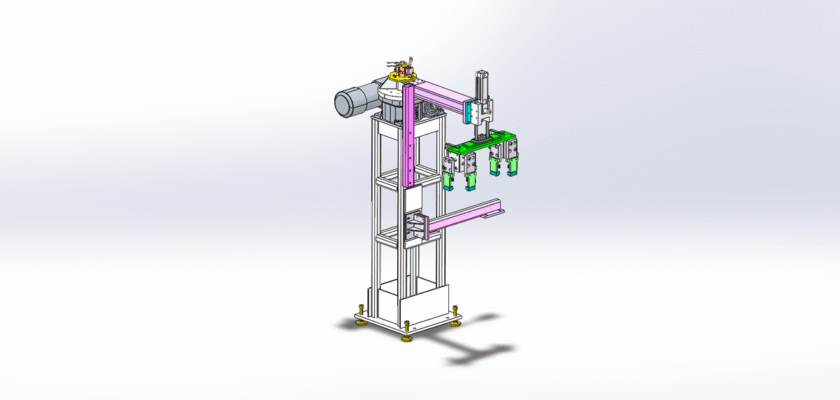
يوفر هذا الرسم المجاني القابل للتنزيل نظرة تفصيلية على تصميم ووظيفة آلية الإمساك الروبوتية الشائعة. إنه مورد رائع للمهندسين الميكانيكيين وطلاب الروبوتات وعشاق الأتمتة الذين يرغبون في فهم المبادئ الكامنة وراء التلاعب الآلي.
الميزات الرئيسية:
- فكي قابض متعدد الاستخدامات: يسلط الرسم الضوء على الفكوك القابلة للتبديل والتعديل التي تسمح للماسك بالتعامل مع مجموعة كبيرة من أشكال الأجسام وأحجامها.
- نظام التشغيل: توضح المخططات النظام الهوائي أو النظام الذي يعمل بالهواء المضغوط أو المؤازر الذي يوفر القوة والتحكم اللازمين لفتح القابض وإغلاقه بدقة.
- مستشعرات مدمجة: يُظهر التصميم استخدام مستشعرات القوة والقرب التي توفر تغذية راجعة للروبوت، مما يمكّنه من ضبط قبضته ومنع تلف الأجزاء الحساسة.
- واجهة التغيير السريع: يشرح الرسم تفاصيل الواجهة المعيارية التي تسمح بتبديل القابض بسرعة لأدوات مختلفة، مما يزيد من تنوع الروبوت على خط الإنتاج.