{kind=link}
ارتقِ بمشاريع الأتمتة لديك مع رسمنا المجاني لروبوت جانتري ثلاثي المحاور. روبوت جانتري، المعروف أيضًا باسم الروبوت الديكارتي، هو نظام آلي عالي الكفاءة يستخدم هيكلًا علويًا صلبًا لنقل الحمولات بدقة مذهلة على ثلاثة محاور خطية (س، ص، ع). يُعد هذا التصميم مثاليًا للتطبيقات التي تتطلب مساحة عمل كبيرة ودقة موضعية عالية، مثل: عمليات الالتقاط والوضع، والتوزيع الآلي، والقطع بالليزر. يعد مخططنا الشامل موردًا لا يقدر بثمن للمهندسين والطلاب والهواة الذين يرغبون في فهم الميكانيكا وبناء نظامهم الخاص أو ببساطة التعرف على مبادئ الأتمتة الخطية.
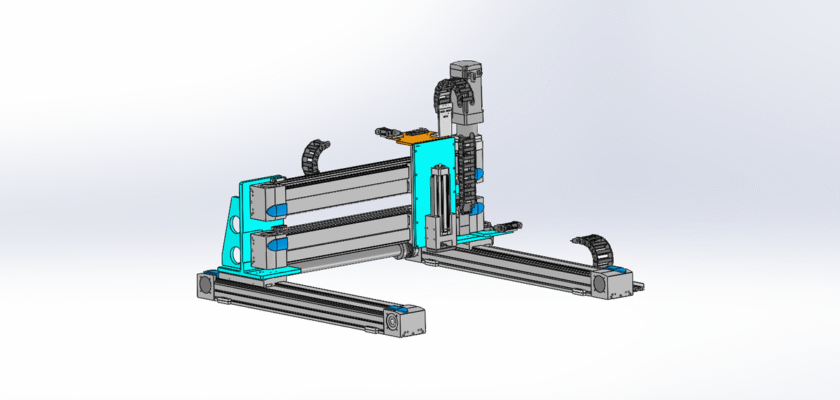
يوفر هذا الرسم التفصيلي نظرة واضحة على المكونات الأساسية لروبوت الجسر، بما في ذلك الإطار القوي، والموجهات الخطية، و محركات متدرجة أو محركات مؤازرة التي تُحرك كل محور. ستكتسب فهمًا عميقًا لكيفية تحويل نظام التحكم لمجموعة من الأوامر إلى حركات مُنسَّقة، مما يُمكِّن الروبوت من أداء مهام مُعقَّدة بدقة مُتكررة. سواءً كنت تُصمِّم خط تجميع جديدًا أو حل أتمتة مُخصَّصًا، فسيكون هذا الرسم دليلك الأمثل. نزِّله مجانًا وابدأ ببناء نظام جسري دقيق خاص بك.
الميزات الرئيسية:
- مظروف عمل كبير: يعتمد التصميم على هيكل جسر علوي، مما يسمح بتوفير مساحة عمل كبيرة دون المساس بالدقة أو الصلابة الهيكلية.
- التحكم بثلاثة محاور: يوضح الرسم استخدام المحركات المستقلة للتحكم في الحركة على طول المحاور X وY وZ، مما يتيح مجموعة واسعة من الحركات والمهام.
- تصميم قابل للتطوير: يعتمد المخطط على مفهوم معياري، يسمح بتوسيع حجم الماكينة بسهولة لتناسب احتياجات تطبيقك المحددة.
- تفاصيل المكونات: احصل على رؤية واضحة للأجزاء الأساسية، بما في ذلك القضبان الخطية، أو البراغي الكروية أو الأحزمة، ولوحة تثبيت المحرك النهائي، وكيف يتم تجميعها.
- دقة عالية في تحديد المواقع: تم تحسين التصميم لتحقيق الدقة، مما يجعله مناسبًا للتطبيقات حيث يكون التكرار في تحديد المواقع أمرًا بالغ الأهمية لمراقبة الجودة.