{kind=link}
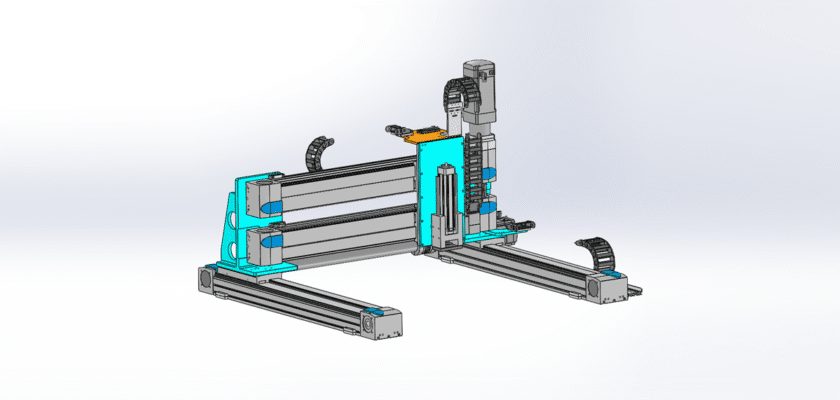
أ روبوت جسري ثلاثي المحاور هو نوع من الروبوتات الصناعية التي تعمل على إطار علوي صلب، وتتحرك على طول ثلاثة محاور خطية (X، Y، وZ). على عكس الروبوتات المفصلية التي تعمل من قاعدة ثابتة، فإن تصميم الروبوت الجسري يسمح له بتغطية مساحة عمل مستطيلة كبيرة بدقة وسرعة عالية. وهذا يجعلها الحل الأمثل للتطبيقات مثل التعبئة على المنصات، ومناولة المواد، والتجميع، ومهام الالتقاط والوضع، وخاصة في التصنيع والتخزين على نطاق واسع. من أهم مزاياه استقراره الهيكلي وقدرته على التعامل مع الأحمال الثقيلة بدقة عالية. يقدم هذا الرسم الشامل، المتاح للتحميل المجاني، مخططًا تفصيليًا لروبوت جسري ثلاثي المحاور عالي الجودة. يُعد هذا الرسم موردًا قيّمًا لمهندسي الميكانيكا، ومتخصصي الأتمتة، وطلاب الروبوتات الراغبين في فهم الأنظمة الميكانيكية وأنظمة التحكم المعقدة التي تُمكّن هذه الآلة القوية.
الميزات الرئيسية:
- مساحة عمل كبيرة وحمولة عالية: يتميز التصميم بإطار جسر علوي قوي يسمح للروبوت بتغطية مساحة واسعة والتعامل مع المكونات الثقيلة، مما يجعله مثاليًا للعمليات واسعة النطاق.
- دقة موضعية استثنائية: تتضمن المخططات التفصيلية استخدام الأدلة الخطية ومسامير الكرة على كل محور، مما يضمن حركة دقيقة وقابلة للتكرار لمهام التنسيب والتجميع الدقيقة.
- تصميم معياري وقابل للتطوير: يسمح الهيكل المعياري للروبوت بتخصيص أطوال السفر على كل محور بسهولة، مما يتيح للمصنعين توسيع نطاق النظام ليناسب احتياجات الإنتاج المحددة الخاصة بهم.
- الوصول من أعلى إلى أسفل: يوفر تصميم البوابة إمكانية الوصول غير المقيد إلى منطقة العمل من الأعلى، مما يبسط عملية دمج الآلات الأخرى ويبسط سير العمل الإنتاجي الإجمالي.