{kind=link}
Un dibujo de robot de pick-and-place de dos ejes y dos coordenadas es una ilustración técnica detallada que describe el diseño, los componentes y la funcionalidad de un sistema robótico diseñado para operaciones de pick-and-place en automatización industrial. Este dibujo es esencial para ingenieros, técnicos y operadores que participan en el diseño, ensamblaje y mantenimiento del robot.
Características principales:
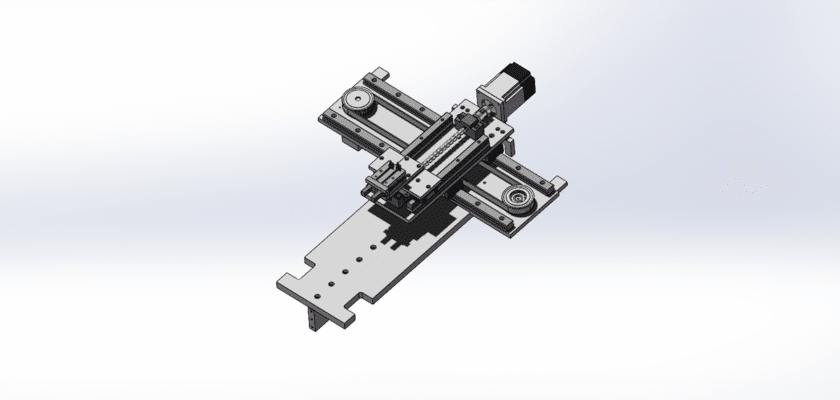
- Disposición general:Una vista completa de la estructura del robot, que muestra la disposición de los componentes clave, como el brazo robótico, la base y el sistema de control.
- Diseño de brazo robótico:Ilustraciones detalladas del brazo de dos ejes, que incluyen:
- Articulaciones y ejes:Diagramas que muestran los puntos de articulación que permiten el movimiento a lo largo de dos coordenadas (horizontal y vertical).
- Efector final:Información sobre la pinza o herramienta fijada al extremo del brazo, diseñada para recoger y colocar objetos.
- Estructura base y de soporte:Descripciones de la base estable que sostiene el brazo y proporciona una base para el movimiento, incluidas las características de montaje o anclaje.
- Sistema de control:Información sobre la unidad de control central que gestiona los movimientos del robot, permitiendo a los operadores programar y ajustar parámetros para tareas de picking-and-place.
- Interfaz de usuario:Ilustraciones del panel de control o pantalla táctil que brindan acceso intuitivo a la configuración de la máquina, opciones de programación y modos operativos.
- Mecanismo de movimiento:Diagramas que detallan los mecanismos que permiten que el brazo se mueva, como motores, engranajes y vínculos que facilitan el funcionamiento suave a lo largo de los dos ejes.
- Fuente de alimentación:Información sobre la fuente de alimentación y el cableado que proporciona energía al robot, incluidas las características de seguridad relacionadas con los componentes eléctricos.
- Sensores y sistemas de retroalimentación:Diagramas que muestran sensores integrados que monitorean la posición y orientación del robot, garantizando la colocación precisa de los objetos.
- Características de seguridad:Información sobre mecanismos de seguridad, como paradas de emergencia, protectores de seguridad y enclavamientos para garantizar un funcionamiento seguro durante tareas de selección y colocación.
- Puntos de acceso de mantenimiento:Orientación sobre áreas diseñadas para fácil acceso durante el mantenimiento y la reparación, facilitando el servicio eficiente del equipo.
Este dibujo sirve como referencia crucial para cualquier persona involucrada en la operación y mantenimiento de robots de selección y colocación de dos ejes y dos coordenadas, lo que garantiza un rendimiento efectivo, eficiencia y cumplimiento de los estándares de la industria en diversas aplicaciones de automatización, como líneas de ensamblaje, empaque y manejo de materiales.