{kind=link}
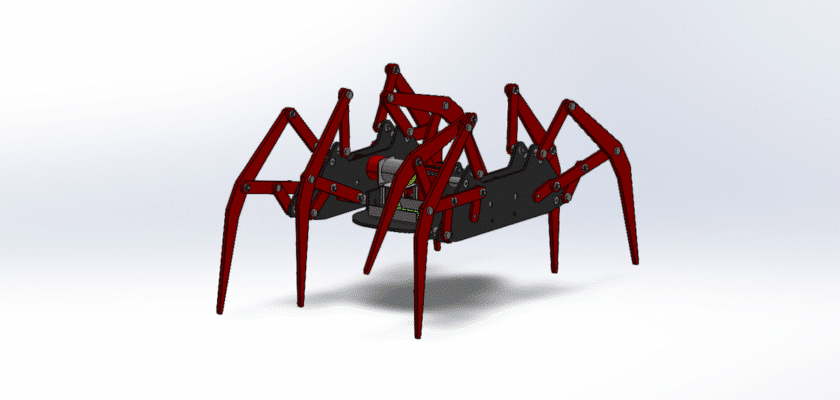
Aventúrate en el apasionante mundo de la robótica bioinspirada con nuestro dibujo mecánico completo para el Robot gateante 01Este diseño proporciona el plano para un sofisticado robot caminante hexápodo (de seis patas), un proyecto fantástico para estudiantes, creadores y entusiastas de la robótica. El diseño multipatas proporciona una estabilidad superior y la capacidad de desplazarse por terrenos irregulares donde los robots con ruedas podrían fallar. Nuestro dibujo gratuito es el primer paso para construir una creación mecatrónica compleja e impresionante.
Este dibujo se centra en la estructura mecánica completa, desde el chasis hasta los intrincados mecanismos de las patas, lo que proporciona una base sólida para tu construcción. Es un proyecto perfecto para quienes buscan explorar temas avanzados como la cinemática y el control remoto. Al proporcionar los planos mecánicos, te ayudamos a concentrarte en la electrónica y la programación que darán vida a tu creación.
Características principales:
- Diseño de chasis hexápodo: El dibujo detalla un cuerpo principal liviano pero rígido, diseñado específicamente para albergar los servos necesarios, el microcontrolador (como un Arduino o Raspberry Pi) y la fuente de alimentación.
- Patas articuladas de 3 grados de libertad: Cada una de las seis patas presenta un diseño de 3 grados de libertad (DOF), lo que permite un amplio rango de movimiento y posibilita la implementación de pasos de marcha complejos.
- Soportes servo integrados: Los componentes incluyen puntos de montaje precisos y seguros diseñados para servos de hobby de tamaño estándar, lo que simplifica enormemente el proceso de ensamblaje.
- Optimizado para la fabricación: Las piezas están diseñadas para fabricarse fácilmente mediante métodos de bricolaje populares, como la impresión 3D o el corte por láser, lo que hace que el proyecto sea accesible para cualquier taller moderno.