{kind=link}
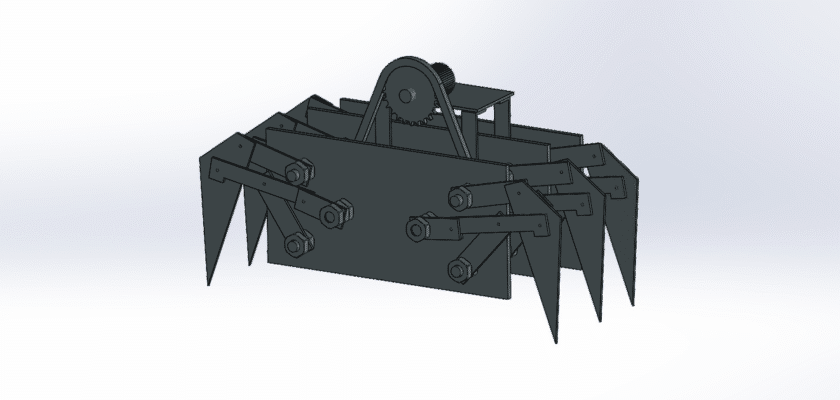
Entrez dans le monde fascinant de la robotique avec nos dessins techniques gratuits d'un Araignée mécanique 2 Robot. Ce plan complet offre un aperçu détaillé de la conception et de l'ingénierie complexes d'un robot marcheur multi-jambes. Le design « araignée » est une merveille de biomimétisme, illustrant comment les ingénieurs reproduisent les mouvements biologiques pour évoluer sur terrain accidenté avec stabilité et agilité. Les dessins offrent une vue détaillée des liaisons complexes, du placement des servomoteurs et de la structure qui fonctionnent ensemble pour créer un robot marcheur dynamique.
Ce pack de dessins est une ressource essentielle pour les étudiants, les amateurs et les professionnels de la robotique. En étudiant ces plans, vous approfondirez votre compréhension de la cinématique inverse, de la coordination des jambes et des défis mécaniques liés à la création d'un robot mobile. Les schémas détaillés constituent un outil pédagogique idéal pour apprendre l'intégration des pièces mécaniques et électroniques. Que vous construisiez votre propre robot ou que vous soyez simplement curieux de comprendre son fonctionnement, nos dessins gratuits et compatibles CAO sont une ressource précieuse. Téléchargez-les dès aujourd'hui et découvrez le monde de la robotique à jambes.
Caractéristiques principales :
- Liaison complexe des jambes : Les dessins détaillent la conception complexe des jambes, mettant en valeur les liaisons et les articulations qui permettent un mouvement multidirectionnel et une stabilité.
- Intégration du servomoteur : Les plans illustrent le placement et le montage précis des servomoteurs pour chaque jambe, essentiels pour un mouvement contrôlé et fluide.
- Conception biomimétique : Les plans mettent en évidence la manière dont la structure imite les pattes d'une véritable araignée, permettant une navigation efficace sur diverses surfaces.
- Construction modulaire : La conception offre une compréhension claire d’un système construit dans un souci de modularité, ce qui facilite l’assemblage, la modification et la réparation.