{kind=link}
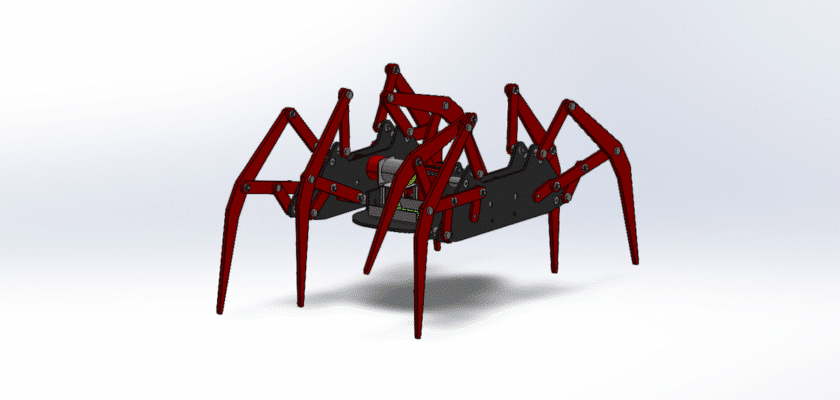
Aventurez-vous dans le monde passionnant de la robotique bio-inspirée avec notre dessin mécanique complet pour le Robot rampant 01Ce projet constitue le plan d'un robot marcheur hexapode (à six pattes) sophistiqué, un projet fantastique pour les étudiants, les créateurs et les passionnés de robotique. Sa conception multi-pattes offre une stabilité supérieure et permet de naviguer sur des terrains accidentés où les robots à roues pourraient échouer. Notre dessin gratuit est votre premier pas vers la construction d'une création mécatronique complexe et impressionnante.
Ce dessin se concentre sur la structure mécanique complète, du châssis aux mécanismes complexes des pieds, offrant une base solide pour votre construction. C'est un projet idéal pour ceux qui souhaitent explorer des sujets avancés comme la cinématique et la télécommande. En fournissant les plans mécaniques, nous vous permettons de vous concentrer sur l'électronique et la programmation qui donneront vie à votre création.
Caractéristiques principales :
- Conception du châssis hexapode : Le dessin détaille un corps principal léger mais rigide, spécialement conçu pour abriter les servos nécessaires, le microcontrôleur (comme un Arduino ou un Raspberry Pi) et l'alimentation.
- Jambes articulées à 3 degrés de liberté : Chacun des six pieds est doté d'une conception à 3 degrés de liberté (DOF), permettant une large gamme de mouvements et permettant la mise en œuvre d'allures de marche complexes.
- Supports de servo intégrés : Les composants comprennent des points de montage précis et sécurisés conçus pour les servos de loisir de taille standard, simplifiant considérablement le processus d'assemblage.
- Optimisé pour la fabrication : Les pièces sont conçues pour être facilement fabriquées à l'aide de méthodes de bricolage courantes telles que l'impression 3D ou la découpe laser, rendant le projet accessible à tout atelier moderne.