{kind=link}
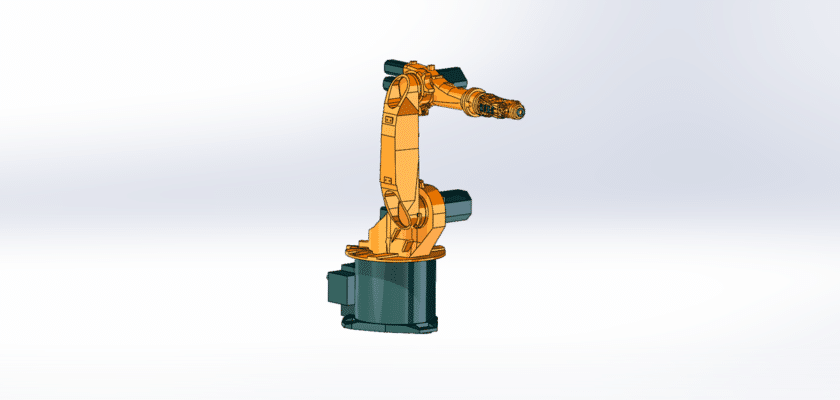
An D25 KR6 Robot Arm Drawing is a detailed technical illustration that outlines the design, components, and functionality of the D25 KR6 robotic arm. This drawing is essential for engineers, technicians, and operators involved in the deployment, programming, and maintenance of this specific robotic model.
Caractéristiques principales :
- Disposition générale: A comprehensive view of the D25 KR6 robot arm, showcasing its structure and design, including joint configurations and reach capabilities.
- Configuration des articulations: Detailed illustrations of the arm’s joints, typically including:
- articulations rotoïdes: Descriptions of the types of joints that provide rotational movement, allowing for flexible positioning.
- Degrés de liberté: Information about the number of degrees of freedom (DOF) the arm provides, essential for understanding its operational range.
- Segments de bras: Diagrams showing the individual segments of the arm, including:
- Longueurs des liens: Specifications on the lengths of the arm segments, which determine the reach and workspace of the robot.
- Composition du matériau: Information about the materials used in construction, ensuring strength and durability.
- Système d'actionnement: Descriptions of the motors and actuators used to drive the robot’s movements, including:
- Servomoteurs: Details on the types of servo motors employed for precise control of each joint.
- Power Requirements: Specifications regarding the electrical requirements for operating the robot.
- Effecteur final: Information about the tool or gripper attached to the end of the arm, designed for specific tasks such as picking, placing, or assembly operations.
- Système de contrôle: Détails sur l'unité de contrôle qui gère les opérations du robot, notamment :
- Interface de programmation: Information about the software used for programming the robot’s movements and tasks.
- Communication Protocols: Descriptions of the communication methods used to interface with the robot, such as Ethernet or serial connections.
- Caractéristiques de sécurité: Information on integrated safety mechanisms, including emergency stop buttons, overload protection, and sensors that prevent accidents during operation.
- Interface utilisateur: Illustrations of any control panels or touchscreens that provide operators with access to robot settings, operational modes, and diagnostics.
- Points d'accès de maintenance:Conseils sur les zones conçues pour un accès facile pendant la maintenance et la réparation, facilitant un entretien efficace du robot.
- Spécifications de performance:Résumé des indicateurs de performance clés, tels que la capacité de charge utile, la portée, la vitesse et la précision, fournissant des informations essentielles pour la planification opérationnelle.
This drawing serves as a crucial reference for anyone involved in the operation and maintenance of the D25 KR6 robot arm, ensuring effective performance, reliability, and adherence to industry standards in various applications, including manufacturing, assembly, and material handling.