{kind=link}
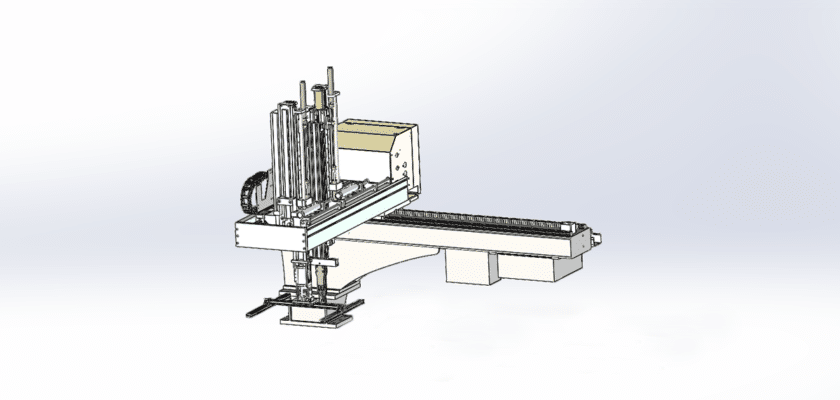
Un dessin de robot à deux bras à marche horizontale est une illustration technique détaillée représentant la conception, les composants et les fonctionnalités d'un système robotique équipé de deux bras et d'un mécanisme de marche horizontale. Ce dessin est essentiel pour les ingénieurs, techniciens et opérateurs impliqués dans le développement, l'exploitation et la maintenance de ces robots.
Caractéristiques principales :
- Disposition générale:Une vue complète du robot, présentant sa structure et la disposition de ses composants, y compris les bras et le mécanisme de marche.
- Structure du robot:Illustrations détaillées du cadre et du mécanisme de marche du robot, notamment :
- Système de base et de mobilité:Informations sur la structure de base qui soutient le robot, dotée d'un système de marche horizontale pouvant inclure des jambes ou des mécanismes de roulement.
- Configuration du bras:Schémas mettant en évidence la conception et l'articulation des bras doubles, mettant en valeur leur amplitude de mouvement et leur flexibilité pour effectuer diverses tâches.
- Détails des articulations et de l'actionnement:Descriptions des articulations et des actionneurs utilisés dans les bras et le mécanisme de marche, y compris :
- Degrés de liberté:Spécifications sur les degrés de liberté des bras et des jambes, permettant des mouvements et des manipulations complexes.
- Effecteurs terminaux:Informations sur les outils ou pinces attachés à chaque bras, conçus pour des tâches spécifiques, telles que :
- Mécanismes de préhension: Détails sur la conception des effecteurs terminaux, qui peuvent inclure des doigts, des griffes ou des dispositifs d'aspiration pour manipuler des objets.
- Système de contrôle: Détails sur l'unité de contrôle qui gère les opérations du robot, notamment :
- Automate programmable industriel (API):Informations sur l'automate ou le logiciel utilisé pour l'automatisation et le contrôle précis des mouvements.
- Interface utilisateur:Illustrations de panneaux de contrôle ou d'interfaces à écran tactile pour programmer les tâches du robot et surveiller ses performances.
- Capteurs et systèmes de rétroaction:Schémas montrant des capteurs intégrés qui fournissent un retour d'information sur la position, l'orientation et l'interaction du robot avec l'environnement, améliorant ainsi la précision opérationnelle.
- Caractéristiques de sécurité:Informations sur les mécanismes de sécurité, notamment les boutons d'arrêt d'urgence, les capteurs de détection de collision et les capots de protection pour garantir un fonctionnement sûr pendant les tâches.
- Points d'accès de maintenance:Conseils sur les zones conçues pour un accès facile pendant la maintenance et la réparation, facilitant un entretien efficace du robot.
- Spécifications de performance:Résumé des indicateurs de performance clés, tels que la capacité de charge utile, la vitesse de marche et la précision, fournissant des informations essentielles pour la planification opérationnelle.
- Contexte d'application:Brèves descriptions des applications typiques du robot à double bras à marche horizontale, telles que dans les processus de fabrication, de logistique et d'assemblage.
Ce dessin sert de référence essentielle pour toute personne impliquée dans l'exploitation et la maintenance d'un robot à double bras à marche horizontale, garantissant des performances efficaces, une fiabilité et une conformité aux normes de l'industrie dans diverses applications d'automatisation.