{kind=link}
Un mécanisme de préhension robotique, également appelé pince robotique ou effecteur terminal, est le dispositif fixé à l'extrémité d'un bras robotique qui lui permet d'interagir avec son environnement. C'est la « main » du robot, conçue pour effectuer des tâches telles que saisir, maintenir et placer des objets. Ces mécanismes se présentent sous une grande variété de formes, des simples pinces parallèles à deux doigts aux systèmes à vide complexes et aux outils magnétiques, chacun étant adapté à une application spécifique. Le choix de la pince est crucial pour la réussite de toute tâche automatisée, car elle doit pouvoir saisir l'objet en toute sécurité sans l'endommager, tout en offrant la vitesse et la précision nécessaires.
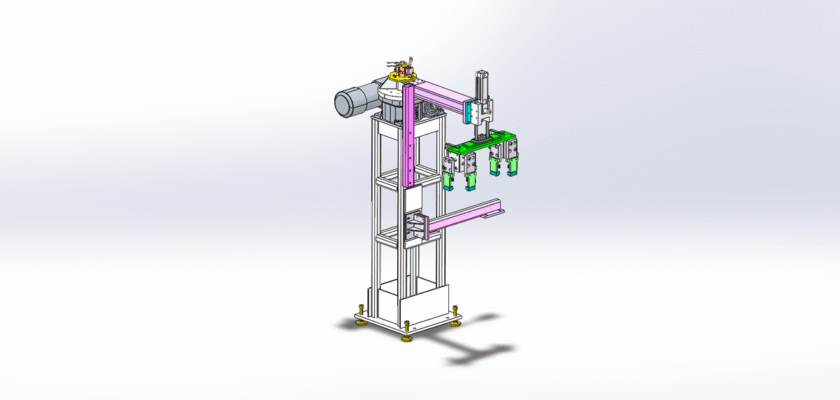
Ce dessin téléchargeable gratuitement offre un aperçu détaillé de la conception et du fonctionnement d'un mécanisme de préhension robotique courant. C'est une ressource précieuse pour les ingénieurs en mécanique, les étudiants en robotique et les passionnés d'automatisation qui souhaitent comprendre les principes de la manipulation robotique.
Caractéristiques principales :
- Mâchoires de préhension polyvalentes : Le dessin met en évidence les mâchoires interchangeables et réglables qui permettent à la pince de manipuler une large gamme de formes et de tailles d'objets.
- Système d'actionnement : Les plans illustrent le système pneumatique ou servo-entraîné qui fournit la force et le contrôle nécessaires pour ouvrir et fermer la pince avec précision.
- Capteurs intégrés : La conception met en valeur l'utilisation de capteurs de force et de proximité qui fournissent un retour d'information au robot, lui permettant d'ajuster sa prise et d'éviter d'endommager les pièces délicates.
- Interface de changement rapide : Le dessin détaille l'interface modulaire qui permet de remplacer rapidement la pince par différents outils, maximisant ainsi la polyvalence du robot sur une ligne de production.