{kind=link}
Un robot à six axes, aussi appelé robot articulé, est un bras mécanique polyvalent et sophistiqué conçu pour l'automatisation industrielle. Doté de six degrés de liberté, il peut imiter les mouvements d'un bras humain, permettant ainsi des tâches complexes et une amplitude de mouvement remarquable. Chaque axe, ou articulation, est entraîné par un servomoteur, permettant des mouvements de rotation autour des axes x, y et z (roulement, tangage et lacet). Cette conception complexe permet au robot d'effectuer des opérations précises et efficaces dans divers processus de fabrication.
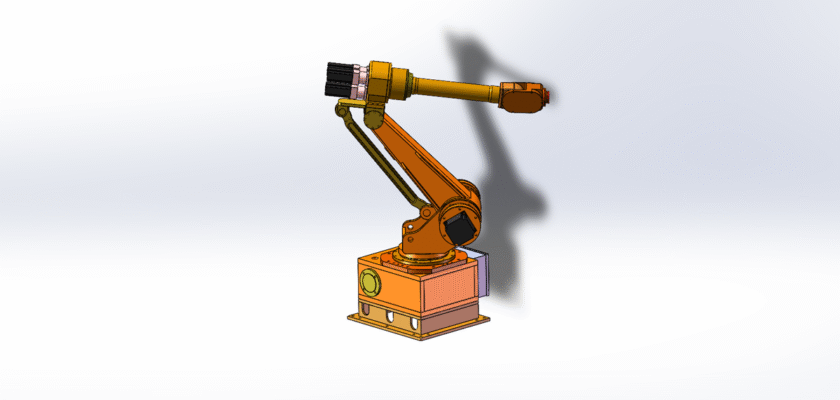
Notre schéma complet offre un aperçu détaillé des principaux composants et de la structure d'un robot à six axes. Il comprend : base, épaule, coude, poignet et effecteur terminal, tous méticuleusement conçus pour fonctionner en harmonie. Les trois premiers axes permettent le positionnement du bras, tandis que les trois derniers assurent un contrôle précis de l'orientation de l'outil. Ce dessin est une ressource précieuse pour les étudiants, les ingénieurs et les amateurs qui souhaitent comprendre, concevoir ou construire leurs propres systèmes robotiques. Vous découvrirez la configuration mécanique, les liaisons et la conception globale qui contribuent à sa grande adaptabilité et à ses performances.
Caractéristiques principales :
- Six degrés de liberté : Offre une gamme complète de mouvements, permettant au robot d'atteindre n'importe quel point et orientation dans son espace de travail.
- Conception articulée : Imite un bras humain pour une dextérité et une flexibilité exceptionnelles.
- Précision et répétabilité : Conçu pour une grande précision, garantissant des résultats cohérents dans les tâches répétitives telles que le soudage, l'assemblage et la manutention des matériaux.
- Applications polyvalentes : Convient à un large éventail d’industries, notamment l’automobile, l’électronique et la logistique.
- Dessin CAO détaillé : Un incontournable à des fins éducatives, pour les projets de bricolage et comme référence professionnelle.