{kind=link}
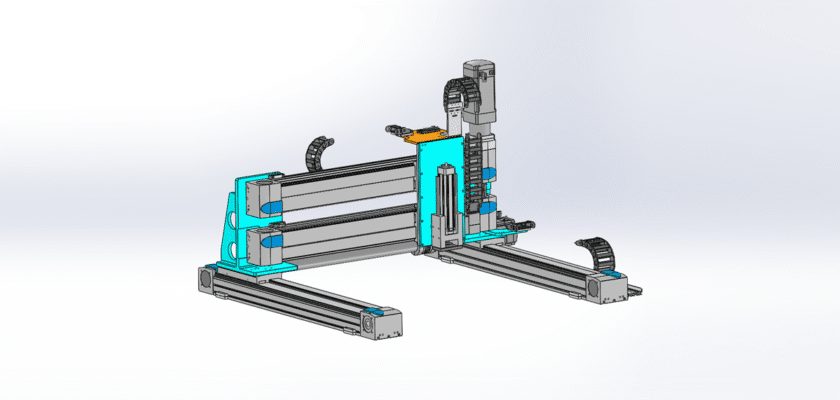
UN robot portique à trois axes est un type de robot industriel qui fonctionne sur un châssis rigide, se déplaçant le long de trois axes linéaires (X, Y et Z). Contrairement aux robots articulés qui fonctionnent à partir d'une base fixe, la conception d'un robot portique lui permet de couvrir un grand espace de travail rectangulaire avec une grande précision et une grande vitesse. Cela en fait une solution idéale pour des applications telles que la palettisation, la manutention, l'assemblage et les tâches de prélèvement et de placement, en particulier dans la fabrication et l'entreposage à grande échelle. Sa stabilité structurelle et sa capacité à supporter des charges lourdes avec une précision remarquable sont des atouts majeurs. Ce schéma complet, téléchargeable gratuitement, présente le plan détaillé d'un robot portique trois axes de qualité professionnelle. C'est une ressource précieuse pour les ingénieurs mécaniciens, les spécialistes en automatisation et les étudiants en robotique qui souhaitent comprendre les systèmes mécaniques et de contrôle complexes qui animent cette puissante machine.
Caractéristiques principales :
- Grand espace de travail et charge utile élevée : La conception présente un cadre de portique suspendu robuste qui permet au robot de couvrir une large zone et de manipuler des composants lourds, ce qui le rend parfait pour les opérations à grande échelle.
- Précision de positionnement exceptionnelle : Les plans détaillent l'utilisation de guides linéaires et de vis à billes sur chaque axe, garantissant un mouvement précis et répétable pour des tâches de placement et d'assemblage précises.
- Conception modulaire et évolutive : La structure modulaire du robot permet une personnalisation facile des longueurs de déplacement sur chaque axe, permettant aux fabricants de faire évoluer le système pour répondre à leurs besoins de production spécifiques.
- Accès descendant : La conception du portique offre un accès illimité à la zone de travail par le haut, simplifiant l'intégration d'autres machines et rationalisant le flux de travail de production global.