{kind=link}
Welding large workpieces, long seams, or multiple joints far apart presents a major bottleneck. A stationary robot has a limited reach, forcing you to constantly move the part (which is inefficient) or use multiple robots (which is expensive). The solution is to make the robot mobile.
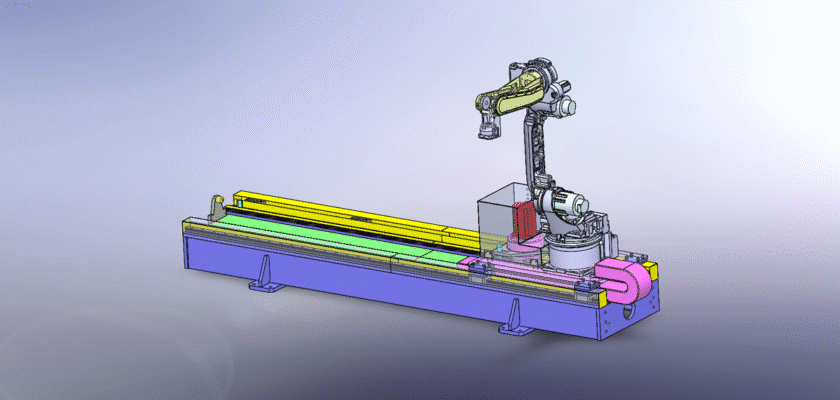
MechStream offers the complete engineering drawing for a Ground Rail Joint Welding Robot system. This is an advanced automation cell blueprint, integrating a 6-axis robot onto a 7th-axis linear track. This design allows the robot to travel long distances to weld multiple joints on a large structure, such as a pipeline, structural steel, or a long chassis.
Our professional drawing is designed for automation integrators and fabricators. It details not just the robot and rail, but the entire support structure. This includes the heavy-duty ground rail, the precision-driven mobile carriage, and the critical cable management system (energy chain) required to handle the welder power, gas, and data lines during travel. Download our free CAD and PDF files to build a system that delivers consistent, high-speed welds over a massive work envelope.
Key Features:
- 7th-Axis Welding Integration: Complete design for mounting an articulated robot on a linear ground rail for extended-reach welding.
- Integrated Cable Management: Features a detailed layout for an energy chain (cable carrier) to safely manage welding power, gas, and wire-feed lines.
- Heavy-Duty Carriage & Rail: Robust structure designed to provide a stable, vibration-free platform for the robot, ensuring high-quality weld beads.
- Welder Mounting Provision: Includes dedicated space and mounting points on the mobile carriage for the power source or wire feeder, minimizing cable drag.
- Precision Drive System: Details a rack-and-pinion drive for the rail, ensuring accurate, repeatable positioning and controlled travel speed during welding.