{kind=link}
Um Desenho de Robô Pick-and-Place de 2 Eixos e Duas Coordenadas é uma ilustração técnica detalhada que descreve o projeto, os componentes e a funcionalidade de um sistema robótico projetado para operações de pick-and-place em automação industrial. Este desenho é essencial para engenheiros, técnicos e operadores envolvidos no projeto, montagem e manutenção do robô.
Principais recursos:
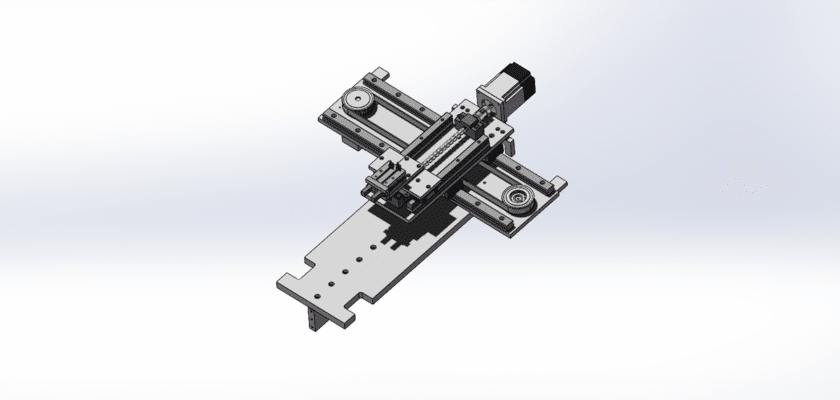
- Layout geral:Uma visão abrangente da estrutura do robô, mostrando o arranjo dos principais componentes, como o braço robótico, a base e o sistema de controle.
- Design de braço robótico: Ilustrações detalhadas do braço de dois eixos, incluindo:
- Articulações e Eixos: Diagramas mostrando os pontos de articulação que permitem o movimento ao longo de duas coordenadas (horizontal e vertical).
- Efetor final:Informações sobre a pinça ou ferramenta fixada na extremidade do braço, projetada para pegar e colocar objetos.
- Estrutura de base e suporte: Descrições da base estável que suporta o braço e fornece uma base para o movimento, incluindo quaisquer recursos de montagem ou ancoragem.
- Sistema de controle: Informações sobre a unidade de controle central que gerencia os movimentos do robô, permitindo que os operadores programem e ajustem parâmetros para tarefas de pegar e colocar.
- Interface do usuário: Ilustrações do painel de controle ou tela sensível ao toque que fornecem acesso intuitivo às configurações da máquina, opções de programação e modos operacionais.
- Mecanismo de movimento: Diagramas detalhando os mecanismos que permitem que o braço se mova, como motores, engrenagens e articulações que facilitam a operação suave ao longo dos dois eixos.
- Fonte de energia: Informações sobre a fonte de energia e a fiação que fornece energia ao robô, incluindo quaisquer recursos de segurança relacionados aos componentes elétricos.
- Sensores e Sistemas de Feedback: Diagramas mostrando sensores integrados que monitoram a posição e a orientação do robô, garantindo o posicionamento preciso dos objetos.
- Recursos de segurança: Informações sobre mecanismos de segurança, como paradas de emergência, proteções de segurança e intertravamentos para garantir uma operação segura durante tarefas de coleta e colocação.
- Pontos de acesso de manutenção: Orientação sobre áreas projetadas para fácil acesso durante manutenção e reparo, facilitando a manutenção eficiente do equipamento.
Este desenho serve como uma referência crucial para qualquer pessoa envolvida na operação e manutenção de robôs pick-and-place de 2 eixos e duas coordenadas, garantindo desempenho eficaz, eficiência e aderência aos padrões da indústria em várias aplicações de automação, como linhas de montagem, embalagens e manuseio de materiais.