{kind=link}
Um Desenho de Equipamento de Carga e Descarga Automática Robótica é uma ilustração técnica detalhada que descreve o projeto, os componentes e o fluxo de trabalho de um sistema robótico projetado especificamente para o carregamento e descarregamento automáticos de materiais e produtos. Este desenho é essencial para engenheiros, operadores e técnicos envolvidos no desenvolvimento, operação e manutenção de sistemas de manuseio automatizados.
Principais recursos:
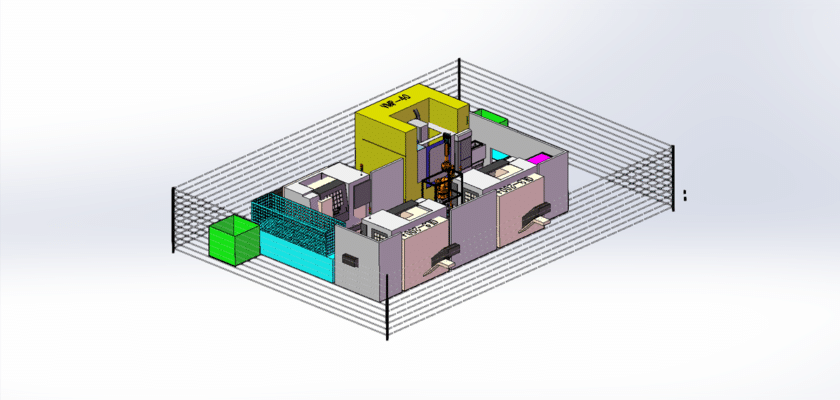
- Layout geral: Uma visão abrangente de todo o sistema de carga e descarga, mostrando a disposição dos robôs, transportadores e áreas de armazenamento dentro do ambiente operacional.
- Braços Robóticos: Ilustrações detalhadas dos braços robóticos usados para tarefas de carga e descarga, incluindo:
- Configuração do braço: Informações sobre a estrutura, ligações e articulações dos braços robóticos, destacando seus graus de liberdade para movimentos versáteis.
- Efetores finais: Descrições de ferramentas especializadas ou pinças acopladas aos braços robóticos para manusear vários tipos de materiais, como ventosas, garfos ou acessórios personalizados.
- Sistemas de movimentação de materiais: Diagramas ilustrando os sistemas usados para transportar materiais de e para as estações de carga e descarga, incluindo:
- Sistemas de transporte: Detalhes sobre correias transportadoras, rolos ou veículos guiados automatizados (AGVs) que facilitam a movimentação de itens.
- Soluções de armazenamento: Informações sobre sistemas automatizados de armazenamento e recuperação que funcionam em conjunto com equipamentos robóticos.
- Sistemas de Controle: Informações sobre a unidade de controle central que gerencia os processos automatizados de carga e descarga, incluindo:
- Controladores Lógicos Programáveis (CLP): Descrições de CLPs ou computadores industriais usados para coordenar movimentos de robôs e manuseio de materiais.
- Interface do usuário: Ilustrações de painéis de controle ou interfaces de software que permitem aos operadores programar tarefas, monitorar o desempenho e ajustar parâmetros.
- Recursos de segurança: Informações sobre mecanismos de segurança incorporados ao sistema, tais como:
- Sistemas de parada de emergência: Detalhes sobre botões de parada de emergência acessíveis perto das zonas de carga e descarga.
- Protetores e sensores de segurança: Informações sobre barreiras de proteção, cortinas de luz e sensores projetados para evitar acidentes e garantir a segurança do operador.
- Fixadores de peças de trabalho: Ilustrações de dispositivos ou gabaritos usados para fixar itens durante o carregamento e descarregamento, garantindo estabilidade e precisão.
- Integração com outros sistemas: Informações sobre como o equipamento de carga e descarga se integra a outros processos automatizados, como linhas de montagem ou sistemas de embalagem, para otimizar as operações.
- Sistemas de Controle de Qualidade: Descrições de medidas integradas de controle de qualidade, incluindo:
- Estações de Inspeção: Informações sobre sensores ou câmeras que verificam o manuseio e posicionamento corretos dos materiais.
- Equipamento de teste: Detalhes sobre qualquer aparelho de teste usado para garantir a qualidade dos produtos carregados ou descarregados.
- Pontos de acesso de manutenção: Orientação sobre áreas projetadas para fácil acesso durante manutenção e reparo, facilitando a manutenção eficiente do equipamento robótico.
- Especificações de desempenho: Resumo das principais métricas de desempenho, como velocidades de carga e descarga, precisão e eficiência operacional, fornecendo informações essenciais para otimização de processos.
- Contexto da aplicação: Breves descrições de aplicações típicas para sistemas automáticos de carga e descarga em vários setores, incluindo manufatura, armazenagem, processamento de alimentos e logística.
Este desenho serve como uma referência vital para qualquer pessoa envolvida no projeto, operação e manutenção de sistemas robóticos automáticos de carga e descarga, garantindo desempenho eficaz, confiabilidade e aderência aos padrões da indústria em automação de movimentação de materiais.