{kind=link}
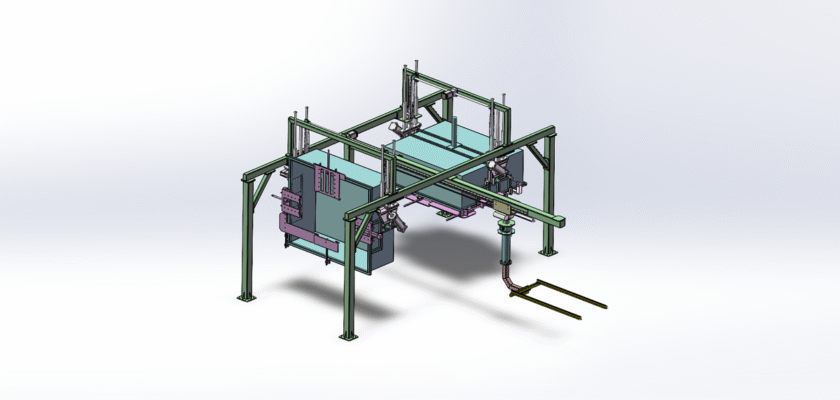
Otimize sua linha de produção com nosso desenho gratuito de robô que levanta e giraEste arquivo CAD detalhado é um recurso essencial para engenheiros, roboticistas e fabricantes que buscam automatizar o manuseio e a reorientação precisos de peças. O desenho oferece uma visão aprofundada de um sistema robótico versátil projetado para executar duas tarefas cruciais em um único movimento fluido: levantar um objeto de uma posição e virá-lo para apresentá-lo a uma estação subsequente. Esta é uma etapa crucial em muitos processos automatizados de montagem e inspeção.
O projeto destaca os mecanismos complexos do robô, incluindo os atuadores lineares de alta precisão para elevação, o atuador rotativo integrado para inversão e as garras especializadas para manuseio seguro das peças. Compreender esses componentes é fundamental para alcançar uma produção de alta velocidade com o mínimo de defeitos. O projeto é otimizado para operação contínua e de alta velocidade e é adaptável a uma ampla gama de tamanhos e geometrias de peças. Seja para construir uma nova estação de automação, atualizar equipamentos existentes ou estudar os princípios da robótica industrial, este desenho fornece os insights técnicos necessários. É uma ferramenta perfeita para estudantes e profissionais, oferecendo uma visão detalhada do futuro da manufatura integrada.
Principais recursos:
- Elevação e inversão integradas: O desenho detalha um único sistema robótico que executa tarefas de elevação e reorientação em um movimento contínuo.
- Atuadores de alta precisão: Ele apresenta um design com atuadores lineares e rotativos que garantem movimento preciso e repetível tanto para elevação quanto para giro.
- Aderência versátil: O projeto ilustra o uso de pinças intercambiáveis ou sistemas de vácuo para manusear uma ampla gama de produtos sem danos.
- Otimização do fluxo de trabalho: Uma ótima ferramenta para entender como otimizar os processos de montagem e inspeção e melhorar a eficiência.
- Especificações técnicas: Inclui dimensões e especificações críticas para os componentes do robô, tornando-o adequado para fins de design e referência.