{kind=link}
Um Desenho de Robô Recuperador de Máquina-ferramenta é uma ilustração técnica detalhada que descreve o projeto, os componentes e as funcionalidades de um robô projetado especificamente para recuperar e manusear máquinas-ferramenta em ambientes industriais. Este desenho é essencial para engenheiros, operadores e técnicos envolvidos no desenvolvimento, operação e manutenção desses sistemas robóticos.
Principais recursos:
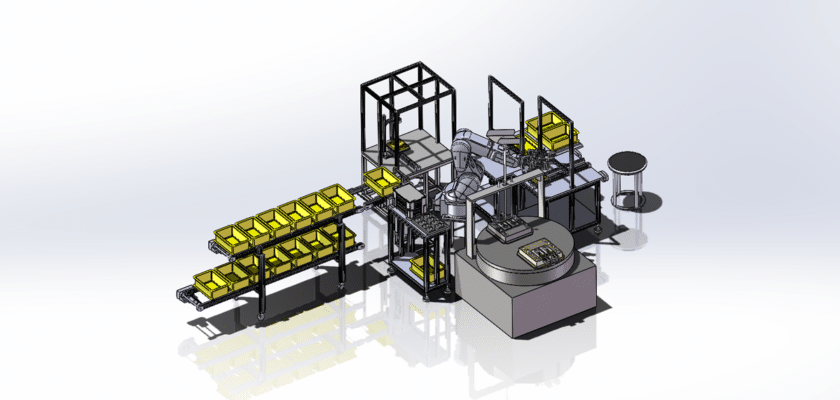
- Layout geral: Uma visão abrangente do robô, mostrando sua estrutura e o arranjo dos principais componentes em um ambiente industrial típico.
- Chassi e Mecanismo de Mobilidade: Ilustrações detalhadas da base do robô, incluindo:
- Estrutura de base: Informações sobre os materiais e o design do chassi, que fornecem estabilidade e suporte.
- Tipo de locomoção: Diagramas mostrando o tipo de movimento empregado, como movimento com rodas ou esteiras, permitindo fácil navegação dentro do espaço de trabalho.
- Estrutura do braço: Informações sobre o braço robótico, incluindo:
- Ligações e articulações: Ilustrações detalhadas dos segmentos individuais (elos) e dos tipos de articulações (revoluta, prismática) que facilitam o movimento flexível.
- Graus de Liberdade: Especificações da amplitude de movimento que permite que o braço alcance várias posições para recuperação de ferramentas.
- Efetor final: Descrições da ferramenta ou pinça fixada na extremidade do braço, incluindo:
- Projeto de pinça de ferramenta: Informações sobre o design e a funcionalidade da pinça usada para segurar e manipular máquinas-ferramentas com segurança.
- Efetores finais intercambiáveis: Detalhes sobre a capacidade de alternar entre diferentes ferramentas com base nos requisitos da tarefa.
- Sistema de controle: Detalhes sobre a unidade de controle que gerencia as operações do robô, incluindo:
- Controlador de robô: Informações sobre os controladores usados para programar e controlar os movimentos e tarefas do robô.
- Interface do usuário: Ilustrações de painéis de controle ou interfaces de software que permitem aos operadores programar tarefas de recuperação e monitorar o desempenho.
- Sensores e Sistemas de Feedback: Diagramas mostrando sensores integrados que fornecem feedback sobre a posição, orientação e interações do robô com ferramentas, aumentando a precisão operacional e a segurança.
- Recursos de segurança: Informações sobre mecanismos de segurança integrados, como botões de parada de emergência, sistemas de detecção de colisão e gabinetes de proteção para garantir uma operação segura em ambientes industriais.
- Fonte de energia: Informações sobre a fonte de energia, incluindo:
- Especificações da bateria: Detalhes sobre o tipo e a capacidade das baterias utilizadas, garantindo uma operação confiável durante todos os turnos.
- Recursos de conectividade: Informações sobre capacidades de comunicação, incluindo:
- Comunicação sem fio: Detalhes sobre conectividade Bluetooth ou Wi-Fi para operação e monitoramento remotos.
- Integração com Sistemas de Fabricação: Informações sobre como o robô pode se conectar a outras máquinas ou softwares para operações simplificadas.
- Pontos de acesso de manutenção: Orientação sobre áreas projetadas para fácil acesso durante manutenção e reparo, facilitando a manutenção eficiente do robô.
- Especificações de desempenho: Resumo das principais métricas de desempenho, como capacidade de carga útil, alcance, velocidade e precisão, fornecendo informações essenciais para o planejamento operacional.
- Contexto da aplicação: Breves descrições de aplicações típicas para robôs de recuperação de máquinas-ferramentas, como em instalações de fabricação, oficinas e linhas de produção automatizadas.
Este desenho serve como uma referência crucial para qualquer pessoa envolvida na operação e manutenção de robôs de recuperação de máquinas-ferramenta, garantindo desempenho eficaz, confiabilidade e aderência aos padrões da indústria em processos de automação e fabricação.