{kind=link}
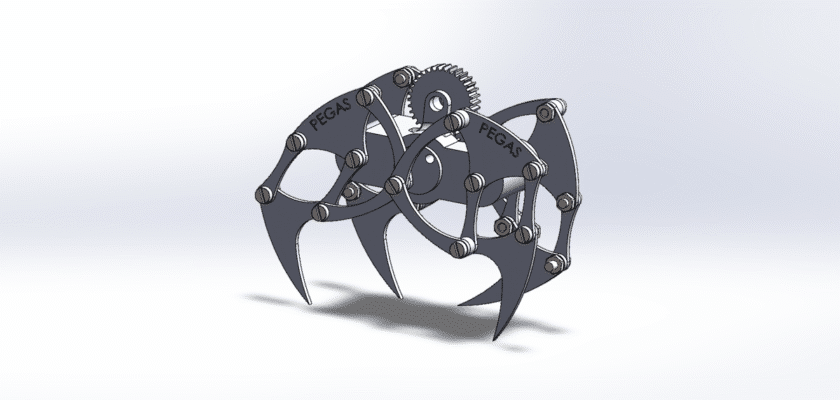
Сделайте шаг в мир продвинутой робототехники с нашим подробным чертежом Ползающий шагающий робот 02. Этот проект представляет собой динамичную четвероногую платформу, вдохновлённую передовыми шагающими роботами, используемыми в современных исследовательских лабораториях. Этот робот, способный как устойчиво ходить, так и ползать, обеспечивает превосходную мобильность на разнообразной и сложной местности. Наш бесплатный чертеж представляет собой полную механическую схему этой сложной машины.
Это идеальный проект для опытных разработчиков, студентов инженерных вузов и разработчиков, стремящихся погрузиться в сложный мир ног. Конструкция обеспечивает прочную механическую основу, позволяя сосредоточиться на сложных системах управления и программировании, необходимых для достижения динамической устойчивости. Загрузите этот бесплатный чертеж, чтобы начать сборку роботизированной платформы нового поколения.
Ключевые особенности:
- Четвероногие ноги с 3 степенями свободы: Оснащен четырьмя высокосочлененными ногами, каждая из которых имеет 3 степени свободы (DOF), что обеспечивает полный диапазон движений для динамичной ходьбы, бега рысью и ползания.
- Крепления приводов с высоким крутящим моментом: Конструкция спроектирована с учетом использования мощных исполнительных механизмов, таких как высокомоментные сервоприводы или бесщеточные двигатели постоянного тока, которые необходимы для чувствительного высокоскоростного движения.
- Шасси с интегрированной электроникой: Включает в себя центральное шасси с достаточным пространством и специальными точками крепления для критически важной электроники, такой как главный контроллер, драйверы двигателей, аккумулятор и инерциальный измерительный блок (IMU).
- Конструктивно оптимизированные детали: Все компоненты спроектированы с высоким соотношением прочности к весу и оптимизированы для 3D-печати из прочных материалов, таких как PETG или ABS, чтобы выдерживать динамические нагрузки.