{kind=link}
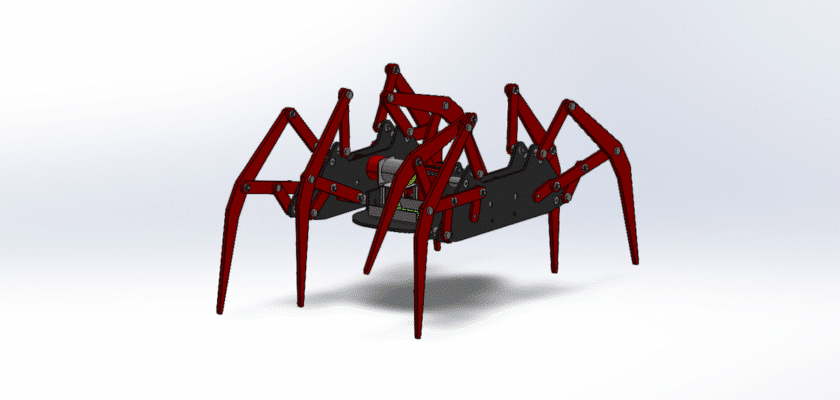
Откройте для себя захватывающий мир биоробототехники с нашим полным механическим чертежом для Ползающий робот 01Этот проект представляет собой проект сложного шестиногого шагающего робота — фантастического проекта для студентов, разработчиков и любителей робототехники. Многоногая конструкция обеспечивает превосходную устойчивость и возможность перемещения по неровной поверхности, где колесные роботы могут потерпеть неудачу. Наш бесплатный чертеж — ваш первый шаг к созданию сложного и впечатляющего мехатронного робота.
Этот чертеж отображает всю механическую структуру, от шасси до сложных механизмов ног, обеспечивая прочную основу для вашей сборки. Это идеальный проект для тех, кто хочет изучить сложные темы, такие как кинематика и дистанционное управление. Предоставляя механические чертежи, мы даем вам возможность сосредоточиться на электронике и программировании, которые воплотят ваше творение в жизнь.
Ключевые особенности:
- Конструкция шасси Hexapod: На чертеже изображен легкий, но жесткий основной корпус, специально разработанный для размещения необходимых сервоприводов, микроконтроллера (вроде Arduino или Raspberry Pi) и источника питания.
- Шарнирные ноги с 3 степенями свободы: Каждая из шести ног имеет конструкцию с тремя степенями свободы (DOF), что обеспечивает широкий диапазон движений и позволяет реализовывать сложные походки.
- Интегрированные крепления сервопривода: Компоненты включают в себя точные и надежные точки крепления, разработанные для любительских сервоприводов стандартного размера, что значительно упрощает процесс сборки.
- Оптимизировано для изготовления: Детали разработаны таким образом, чтобы их можно было легко изготовить с помощью популярных методов самостоятельного изготовления, таких как 3D-печать или лазерная резка, что делает проект доступным для любой современной мастерской.