{kind=link}
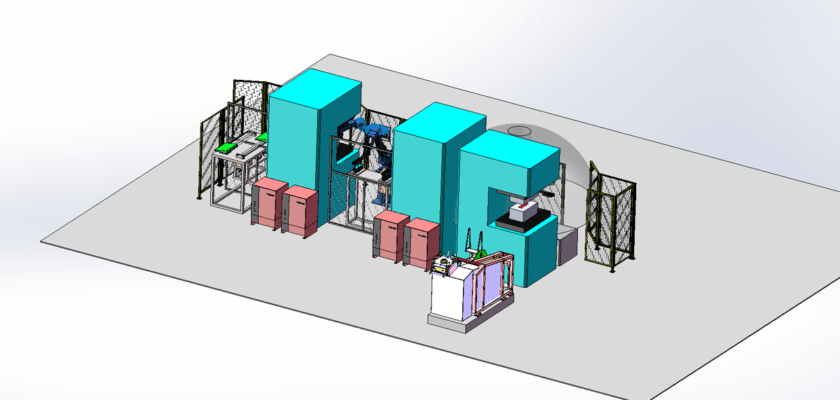
Чертеж решения по загрузке и разгрузке робота на прессовой линии — это подробная техническая иллюстрация, иллюстрирующая конструкцию, компоненты и функциональные возможности роботизированной системы, специально разработанной для загрузки и разгрузки материалов на прессовых линиях. Этот чертеж необходим инженерам, операторам и техническим специалистам, занимающимся разработкой, внедрением и обслуживанием таких роботизированных решений.
Ключевые особенности:
- Общая планировка: комплексный обзор роботизированной системы в составе прессовой линии, демонстрирующий ее интеграцию с другим оборудованием и рабочими процессами.
- Структура роботизированной руки: Подробные иллюстрации роботизированной руки, включая:
- Звенья и соединения: Информация об отдельных сегментах (звеньях) и типах соединений (поворотные, призматические), которые обеспечивают гибкое движение для точной загрузки и разгрузки.
- Степени свободы: Характеристики, указывающие диапазон движения, позволяющий роботу занимать различные положения для эффективной обработки материалов.
- Конструкция конечного эффектора: Описания инструмента или захвата, прикрепленного к роботизированной руке, включая:
- Механизм захвата: Информация о конструкции и функциональности захвата, используемого для надежного удержания и манипулирования заготовками.
- Сменные инструменты: Подробная информация о возможности переключения между различными рабочими органами в зависимости от конкретных требований задач погрузки или разгрузки.
- Система управления: Подробная информация о блоке управления, который управляет работой робота, включая:
- Контроллер робота: Информация о контроллере, используемом для программирования и выполнения задач погрузки и разгрузки.
- Пользовательский интерфейс: Иллюстрации панелей управления или программных интерфейсов, которые позволяют операторам программировать задачи и отслеживать производительность в режиме реального времени.
- Датчики и системы обратной связи: Схемы, демонстрирующие интегрированные датчики, которые обеспечивают обратную связь о положении робота, его ориентации и взаимодействии с материалами, повышая точность и безопасность работы.
- Функции безопасности: Информация о механизмах безопасности, таких как кнопки аварийной остановки, световые завесы и системы обнаружения столкновений, обеспечивающие безопасную работу в условиях высокоскоростных прессовых линий.
- Источник питания: Информация об источнике питания, включая:
- Характеристики аккумулятора или электропитания: Подробная информация о типе и мощности источника питания, используемого для работы робота.
- Механизм мобильности: Информация о системе движения, в том числе:
- Проектирование мобильной базы: Схемы, показывающие, как робот позиционируется для перемещения в зоне прессовой линии для эффективной загрузки и разгрузки.
- Возможности подключения: Информация о возможностях связи, в том числе:
- Беспроводная связь: Подробная информация о подключении по Bluetooth или Wi-Fi для удаленного управления и мониторинга.
- Интеграция с системами Press Line: Информация о том, как робот может взаимодействовать с другим оборудованием на линии прессования для обеспечения бесперебойной работы.
- Точки доступа для обслуживания: Руководство по зонам, предназначенным для легкого доступа при техническом обслуживании и ремонте, что способствует эффективному обслуживанию робота.
- Технические характеристики: сводка ключевых показателей производительности, таких как грузоподъемность, скорость, точность и время цикла, предоставляющая важную информацию для оперативного планирования.
- Контекст приложения: Краткое описание типичных сфер применения робота прессовой линии, подчеркивающее его роль в таких отраслях, как автомобилестроение, штамповка металла и сборка.
Этот чертеж является важным справочным материалом для всех, кто занимается эксплуатацией и обслуживанием погрузочно-разгрузочных роботов в составе прессовых линий, гарантируя эффективную работу, надежность и соответствие отраслевым стандартам промышленной автоматизации.