{kind=link}
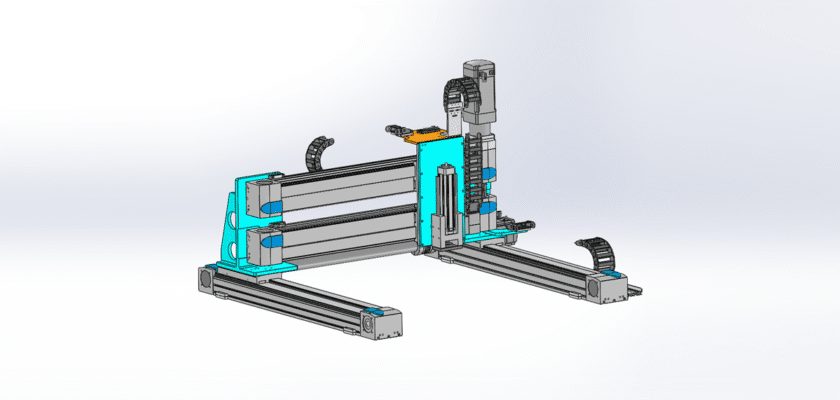
А трехкоординатный портальный робот — тип промышленного робота, работающего на жесткой подвесной раме и перемещающегося по трем линейным осям (X, Y и Z). В отличие от шарнирных роботов, которые работают на фиксированном основании, конструкция портального робота позволяет ему охватывать большое прямоугольное рабочее пространство с высокой точностью и скоростью. Это делает его идеальным решением для таких задач, как паллетирование, погрузка-разгрузка материалов, сборка и перемещение грузов, особенно в крупномасштабном производстве и на складах. Его ключевые преимущества – это структурная устойчивость и способность обрабатывать тяжёлые грузы с исключительной точностью. Этот подробный чертеж, доступный для бесплатного скачивания, представляет собой подробный проект трёхкоординатного портального робота профессионального уровня. Это бесценный ресурс для инженеров-механиков, специалистов по автоматизации и студентов, изучающих робототехнику, которые хотят понять сложные механические и управляющие системы, лежащие в основе работы этой мощной машины.
Ключевые особенности:
- Большое рабочее пространство и высокая полезная грузоподъемность: Конструкция оснащена прочной рамой портала, которая позволяет роботу охватывать большую площадь и перемещать тяжелые компоненты, что делает его идеальным для крупномасштабных операций.
- Исключительная точность позиционирования: В чертежах подробно описано использование линейных направляющих и шариковых винтов на каждой оси, что обеспечивает точность и повторяемость движения для точных задач размещения и сборки.
- Модульная и масштабируемая конструкция: Модульная структура робота позволяет легко настраивать длину перемещения по каждой оси, что дает возможность производителям масштабировать систему в соответствии со своими конкретными производственными потребностями.
- Доступ сверху вниз: Портальная конструкция обеспечивает неограниченный доступ к рабочей зоне сверху, что упрощает интеграцию другого оборудования и оптимизирует общий производственный процесс.