{kind=link}
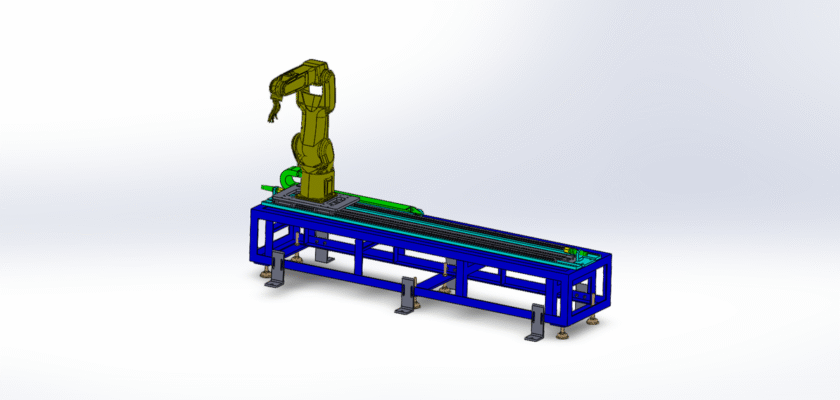
Are you designing a compact automation cell for precision tasks? Our Small Six-Axis Robot Moving Rails drawing provides the complete blueprint for a lightweight, high-precision linear track. This CAD file is the essential resource for engineers and integrators who need to add a “7th axis” of motion to a tabletop or small-payload robot.
Small six-axis robots are champions of dexterity, but their limited reach can be a major constraint. This ground rail system solves that problem, allowing a single small robot to service multiple stations, perform inspections along a length, or complete complex assembly tasks over a larger area. This is ideal for electronics manufacturing, lab automation, or academic research.
This downloadable drawing is not for a heavy industrial track; it is specifically engineered for the lower payloads and high-speed requirements of smaller robots. It details a cost-effective, high-performance design that is easy to build and integrate. The file contains all fabrication details for the lightweight frame, the precision drive system, and the robot mounting carriage, allowing you to build a system perfectly matched to your lightweight automation needs.
Key Features:
- Lightweight, Low-Profile Frame: The design uses lightweight materials (like aluminum extrusion) to create a stiff, low-profile base that is easy to mount on a benchtop or machine frame.
- Precision Drive System: Details a high-speed, low-backlash drive (e.g., timing belt and pulley or a small ball screw) optimized for the rapid, precise movements of small robots.
- Compact Robot Carriage: Features a small, stiff mounting carriage with a universal bolt pattern designed for common tabletop robots (e.g., Universal Robots UR3/UR5, Fanuc LR Mate).
- Modular & Scalable: The design is modular, allowing for easy adjustment of the travel length by simply changing the extrusion and belt/screw length.
- Integrated Cable Carrier: Includes a compact energy chain (e-chain) to safely manage the robot’s cables and air lines without interfering with motion.