{kind=link}
Un plano de solución de carga y descarga robótica para líneas de prensado es una ilustración técnica detallada que describe el diseño, los componentes y las funcionalidades de un sistema robótico diseñado específicamente para la carga y descarga de materiales en operaciones de líneas de prensado. Este plano es esencial para ingenieros, operadores y técnicos involucrados en el desarrollo, la implementación y el mantenimiento de estas soluciones robóticas.
Características principales:
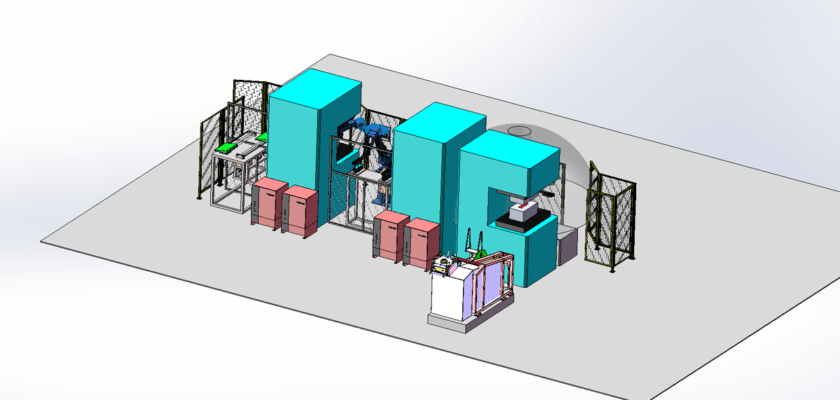
- Disposición general:Una vista completa del sistema de robot dentro de un entorno de línea de prensa, que muestra su integración con otras máquinas y procesos de flujo de trabajo.
- Estructura del brazo robótico:Ilustraciones detalladas del brazo robótico, que incluyen:
- Enlaces y articulaciones:Información sobre los segmentos individuales (enlaces) y tipos de articulaciones (revolucionarias, prismáticas) que permiten un movimiento flexible para una carga y descarga precisas.
- Grados de libertad:Especificaciones que indican el rango de movimiento que permite al robot alcanzar varias posiciones para un manejo efectivo de materiales.
- Diseño del efector final:Descripciones de la herramienta o pinza unida al brazo robótico, incluyendo:
- Mecanismo de pinza:Información sobre el diseño y la funcionalidad de la pinza utilizada para sujetar y manipular piezas de trabajo de forma segura.
- Herramientas intercambiables:Detalles sobre la capacidad de cambiar entre diferentes efectores finales según los requisitos específicos de las tareas de carga o descarga.
- Sistema de control:Detalles sobre la unidad de control que gestiona las operaciones del robot, incluyendo:
- Controlador de robot:Información sobre el controlador utilizado para programar y ejecutar tareas de carga y descarga.
- Interfaz de usuario:Ilustraciones de paneles de control o interfaces de software que permiten a los operadores programar tareas y monitorear el desempeño en tiempo real.
- Sensores y sistemas de retroalimentación:Diagramas que muestran sensores integrados que brindan información sobre la posición, la orientación y la interacción del robot con los materiales, lo que mejora la precisión y la seguridad operativa.
- Características de seguridad:Información sobre mecanismos de seguridad, como botones de parada de emergencia, cortinas de luz y sistemas de detección de colisiones, que garantizan un funcionamiento seguro en entornos de líneas de prensado de alta velocidad.
- Fuente de alimentación:Información sobre la fuente de energía, incluyendo:
- Especificaciones eléctricas o de la batería:Detalles sobre el tipo y capacidad de la fuente de alimentación utilizada para el funcionamiento del robot.
- Mecanismo de movilidad:Información sobre el sistema de movimiento, incluyendo:
- Diseño de base móvil:Diagramas que muestran cómo se posiciona el robot para moverse dentro del área de la línea de prensa para una carga y descarga eficientes.
- Características de conectividad:Información sobre capacidades de comunicación, incluyendo:
- Comunicación inalámbrica: Detalles sobre la conectividad Bluetooth o Wi-Fi para control y monitoreo remoto.
- Integración con sistemas de línea de prensa:Información sobre cómo el robot puede conectarse con otras máquinas en la línea de prensa para un funcionamiento perfecto.
- Puntos de acceso de mantenimiento:Orientación sobre áreas diseñadas para fácil acceso durante el mantenimiento y la reparación, facilitando el servicio eficiente del robot.
- Especificaciones de rendimiento:Resumen de métricas de rendimiento clave, como capacidad de carga útil, velocidad, precisión y tiempo de ciclo, que proporcionan información esencial para la planificación operativa.
- Contexto de aplicación:Breves descripciones de aplicaciones típicas del robot de línea de prensa, destacando su papel en industrias como la fabricación de automóviles, el estampado de metales y el ensamblaje.
Este dibujo sirve como referencia crucial para cualquier persona involucrada en la operación y mantenimiento de robots de carga y descarga en entornos de líneas de prensa, garantizando un rendimiento efectivo, confiabilidad y cumplimiento de los estándares de la industria en automatización industrial.