{kind=link}
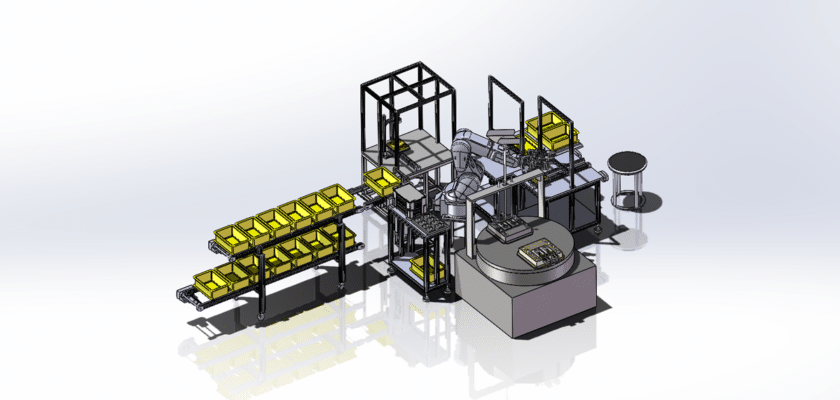
Un dessin de robot récupérateur de machines-outils est une illustration technique détaillée illustrant la conception, les composants et les fonctionnalités d'un robot spécialement conçu pour la récupération et la manutention de machines-outils en milieu industriel. Ce dessin est essentiel pour les ingénieurs, opérateurs et techniciens impliqués dans le développement, l'exploitation et la maintenance de tels systèmes robotisés.
Caractéristiques principales :
- Disposition générale:Une vue complète du robot, présentant sa structure et la disposition des composants clés dans un environnement industriel typique.
- Châssis et mécanisme de mobilité:Illustrations détaillées de la base du robot, notamment :
- Structure de base:Informations sur les matériaux et la conception du châssis, qui assurent stabilité et soutien.
- Type de locomotion:Diagrammes montrant le type de mouvement utilisé, tel que le mouvement sur roues ou sur chenilles, permettant une navigation facile dans l'espace de travail.
- Structure du bras:Informations sur le bras robotique, notamment :
- Liens et articulations:Illustrations détaillées des segments individuels (liens) et des types d'articulations (révolutionnaires, prismatiques) qui facilitent le mouvement flexible.
- Degrés de liberté:Spécifications de l'amplitude de mouvement qui permet au bras d'atteindre différentes positions pour la récupération des outils.
- Effecteur final:Descriptions de l'outil ou de la pince fixé à l'extrémité du bras, y compris :
- Conception de la pince à outils:Informations sur la conception et la fonctionnalité de la pince utilisée pour maintenir et manipuler en toute sécurité les machines-outils.
- Effecteurs terminaux interchangeables: Détails sur la capacité de basculer entre différents outils en fonction des exigences de la tâche.
- Système de contrôle: Détails sur l'unité de contrôle qui gère les opérations du robot, notamment :
- Contrôleur de robot:Informations sur les contrôleurs utilisés pour programmer et contrôler les mouvements et les tâches du robot.
- Interface utilisateur:Illustrations de panneaux de contrôle ou d'interfaces logicielles permettant aux opérateurs de programmer des tâches de récupération et de surveiller les performances.
- Capteurs et systèmes de rétroaction:Schémas montrant des capteurs intégrés qui fournissent un retour d'information sur la position, l'orientation et les interactions du robot avec les outils, améliorant ainsi la précision et la sécurité opérationnelles.
- Caractéristiques de sécurité:Informations sur les mécanismes de sécurité intégrés, tels que les boutons d'arrêt d'urgence, les systèmes de détection de collision et les boîtiers de protection pour garantir un fonctionnement sûr dans les environnements industriels.
- Alimentation électrique:Informations sur la source d'alimentation, notamment :
- Spécifications de la batterie: Détails sur le type et la capacité des batteries utilisées, garantissant un fonctionnement fiable tout au long des quarts de travail.
- Fonctionnalités de connectivité:Informations sur les capacités de communication, notamment :
- Communication sans fil: Détails sur la connectivité Bluetooth ou Wi-Fi pour le fonctionnement et la surveillance à distance.
- Intégration avec les systèmes de fabrication:Informations sur la manière dont le robot peut se connecter à d'autres machines ou logiciels pour des opérations rationalisées.
- Points d'accès de maintenance:Conseils sur les zones conçues pour un accès facile pendant la maintenance et la réparation, facilitant un entretien efficace du robot.
- Spécifications de performance:Résumé des indicateurs de performance clés, tels que la capacité de charge utile, la portée, la vitesse et la précision, fournissant des informations essentielles pour la planification opérationnelle.
- Contexte d'application:Brèves descriptions des applications typiques des robots de récupération de machines-outils, telles que dans les installations de fabrication, les ateliers et les lignes de production automatisées.
Ce dessin sert de référence essentielle pour toute personne impliquée dans l'exploitation et la maintenance de robots de récupération de machines-outils, garantissant des performances efficaces, une fiabilité et le respect des normes de l'industrie dans les processus d'automatisation et de fabrication.